
12 Jan Detekcija anomalija u usevima korišćenjem bespilotnih letelica i dubokog učenja
Tamara Todić
Istraživač-pripravnik, Institut Biosens
U usevima se često pojavljuju anomalije u vidu klastera korova, delova preskočenih tokom setve, delova koji su duplo posejani, visokih podzemnih voda ili prisustva vodenih tokova na njivama. Sve to je nepoželjno i ima značajan uticaj na količinu i kvalitet prinosa, a samim tim i na prihode poljoprivrednika. Zbog toga postoji interes da se ove anomalije detektuju kako bi se pravovremeno odreagovalo odgovarajućim agrotehničkim merama i time smanjili ili čak potpuno izbegli potencijalni gubici.
Slike dobijene pomoću bespilotnih letelica pogodne su za detekciju ovakvih anomalija. Daju pogled na njivu iz ptičije perspektive, može se izaći na teren kad god je to potrebno (ne mora se čekati da satelit naiđe iznad parcele), i lakše je izbeći oblake – dron leti na znatno nižim visinama nego sateliti.

Primer iz baze podataka
Baza podataka koja nam je na raspolaganju data je u okviru Agriculture Vision Challenge-a koji je 2020. godine organizovala CVPR konferencija. Primer slika iz baze je prikazan na slici iznad. Sastoji se iz 12901 slike sa polja kukuruza i soje sa teritorije država Illinois i Iowa. Slikane su dronom, iz ptičije perspektive. Sadrže RGB i NIR (Near InfraRed) kanale. Sem vidljivog dela elektromagnetskog spektra, NIR opseg frekvencija se često koristi u obradi slika u poljoprivredi, jer ukazuje na zdravlje biljaka – zdrave biljke imaju veću reflektansu u NIR opsegu nego nezdrave. Sve slike iz baze labelirane su od strane eksperata iz oblasti agronomije. U bazi je prisutno 6 tipova anomalija:
- prisustvo senki od oblaka na slikama
- deo preskočen tokom sejanja
- duplo posejan deo
- podzemne vode
- vodeni tokovi
- klasteri korova
Za svaku sliku u bazi data je maska koja označava validne piksele, kod kojih nije došlo do izobličenja tokom akvizicije, kao i maska koja označava piksele od interesa. Prilikom evaluacije modela uzimaju se u obzir samo pikseli koji su validni i od interesa.
Problem je za početak rešavan za četiri od šest navedenih klasa:
- deo preskočen tokom sejanja
- duplo posejan deo
- podzemne vode
- vodeni tokovi
Skup podataka je nebalansiran u pogledu broja slika po klasama – najviše primeraka ima iz klasa korova i oblaka. Iz tog razloga su u prvoj varijanti rešenja izostavljene klase oblaka i korova.
Takođe postoji problem i što su neke od anomalija površinski veoma male, tako da na slikama postoji veoma mali udeo piksela sa anomalijom u odnosu na piskele gde su njive u regularnom stanju, što dodatno otežava problem detekcije.
Za rešenje su korišćene duboke konvolucione neuralne mreže. U pitanju su arhitekture koje se koriste za semantičku segmentaciju – gde se svakom pikselu na slici dodeljuje klasa kojoj pripada. Ove mreže imaju veliki broj parametara koji se uče u procesu treninga. Njihovo treniranje je vremenski i memorijski veoma zahtevno. Neophodno je obezbediti što više slika, jer mreža daje bolje rezultate ako se trenira na više različitih primeraka.
Inicijalni rezultati modela prikazani su na slici ispod. U prvoj koloni date su RGB slike, u drugoj NIR slike, u trećoj labele, a u četvrtoj predikcije modela.
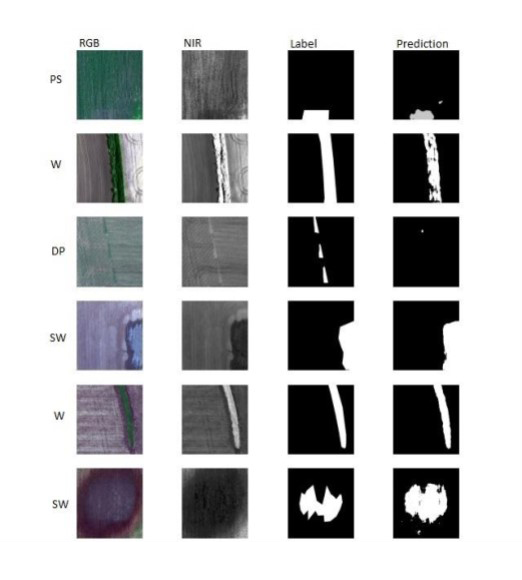
Inicijalni rezultat modela
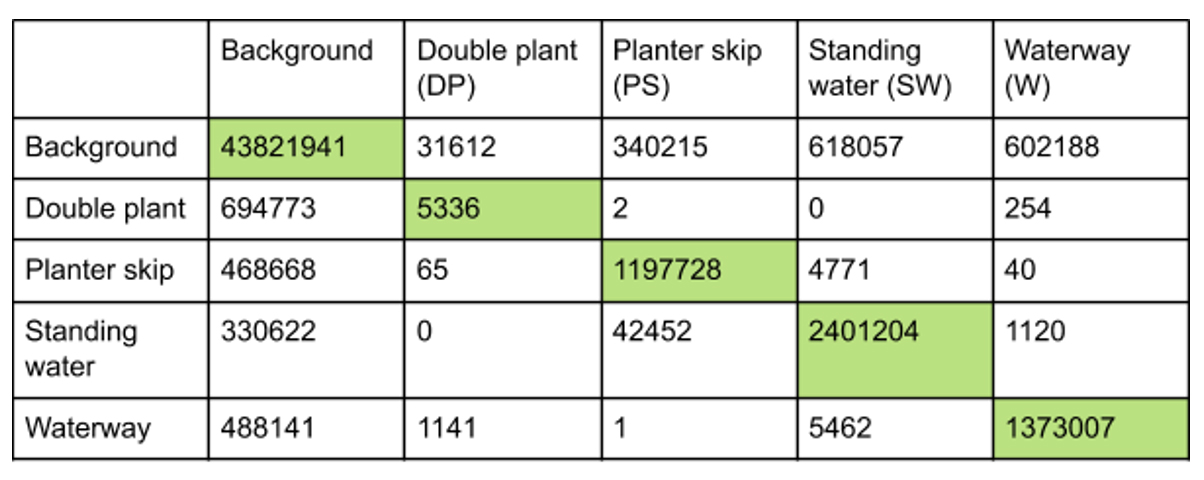
Matrica konfuzije
U gornjoj tabeli prikazana je matrica konfuzije. Vrednosti predstavljaju broj piksela, vrste su stvarna klasa, a kolone predviđena.
Dalji koraci u istraživanju idu ka uključivanju preostale dve klase anomalija, kao i isprobavanju nekih drugih arhitektura. Potrebno je obratiti više pažnje na segmentaciju anomalija malih površina, jer na njima model pravi najveće greške.
Cilj je da se sistem za detekciju anomalija integriše u sisteme za predikciju prinosa, kako bi se uticaj anomalija uzeo u obzir pri proračunu i na taj način povećala tačnost predikcije. Takođe, sa ovakvim sistemom, poljoprivrednici mogu uočiti eventualne propuste učinjene tokom sezone i preduzeti odgovarajuće mere kako bi se umanjio njihov uticaj.
















